How to Use Force Sensors for Relative Measurement Applications

 Ed Haidar, FlexiForce Product Manager and Applications Engineer, shares a story on how he helped a customer use Flexiforce sensors to correlate a change in voltage to a change in force -- otherwise known as a Relative Measurement Approach.
Ed Haidar, FlexiForce Product Manager and Applications Engineer, shares a story on how he helped a customer use Flexiforce sensors to correlate a change in voltage to a change in force -- otherwise known as a Relative Measurement Approach.
For many devices or designs embedded with FlexiForce sensors, the force sensor is used to correlate voltage output to an absolute unit of force (e.g., newton, kilogram, pound, etc.). This is considered an Absolute Measurement Application. These types of applications follow a typical calibration procedure.
On the other hand, when a force sensor is used to correlate change in voltage to a change in force, these are considered Relative Measurement Applications. These force-sensing applications take a different calibration procedure.
Customer Story: Accounting for Drift in a Fluid Level Detection Application
|
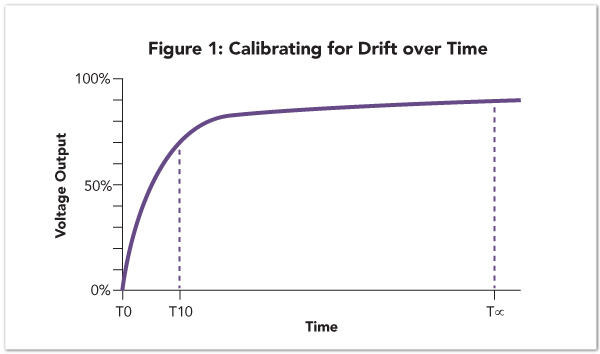
As per our specifications, and when the sensor is powered with our recommended circuit, FlexiForce sensors typically have an output drift rate <5% / logarithmic time. This means the design engineer should have some expectation that the absolute measurement may have a change over time. With relative measurement applications, instead of looking at a specific absolute voltage output, the design engineer can instead correlate the change in voltage to the relative change of the force application. Put simply, for relative measurement applications, the design engineer should look for the differential voltage output as a function of force (or, the slope of V vs F curve (Figure 1)). |
 |
||||||||||||
|
|
|||||||||||||
|
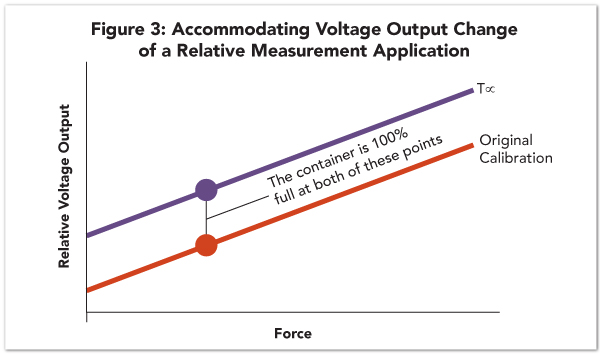
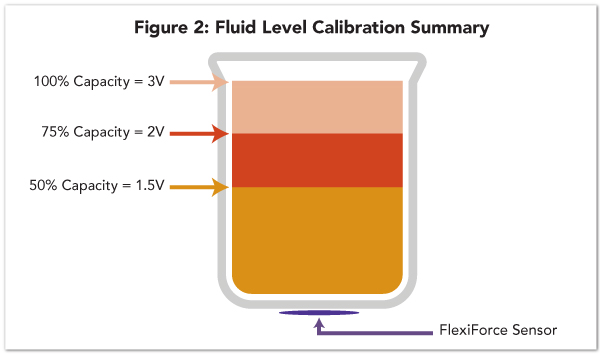
In this example, a customer wanted to use a FlexiForce sensor as a method to determine the level of fluid within a container. As illustrated in Figure 2, the sensor in this application was positioned below the container. Because sensor drift is going to cause the sensor’s output voltage to gradually change over time, using absolute voltage outputs to determine fluid level within a container becomes a challenge. For instance, if the container is half-full for an extended period of time, the static load would cause the output to increase under static load, and could falsely indicate the actual fluid level within the container. Using a relative measurement is useful in this application, because, unlike absolute values, the slope of the V vs F curve stays relatively constant regardless of how much the output has changed (Figure 3). For this application, the design engineer targeted a change in voltage (relative to 100% full) to indicate the fluid level in the container |
Calibration Parameters for this Fluid Level Detection Application
|
||||||||||||
|
Over time, as illustrated in Figure 3, the customer began to notice that at 100% full, the voltage output for the container increased from 3V to a reading of 4V. However, because the differential voltage (with respect to force) remains the same, the design engineer can be confident that a decrease in 1 volt, regardless of the absolute value, will mean the container fluid level has decreased by 25%. |
 |
||||||||||||
Common Application Groups that Follow a Relative Measurement Approach:
|
|
|
Using FlexiForce sensors to detect and measure relative change in force is just one of the four core ways this technology can be used in an embedded applications. This free eBook explains tried & true ways you can innovate your device with this design-friendly force sensing technology. |
|